
Notes · Autonomous systems · XPRIZE Wildfire
AIDEN: an autonomous wildfire-response fleet
A wildfire is winnable in the first ten minutes and very hard to win after. So what does it take to put a drone over every ignition inside that window — detect it, decide who responds, and hit it — with no human in the loop fast enough to matter? That's the question AIDEN — Think Circuits' entry in the XPRIZE Autonomous Wildfire Response competition — is designed to answer. Here's the vision, what exists today, and the operations dashboard running in your browser.
The vision: a standing fleet, not a callout
Aerial firefighting today is a callout model. Something burns, someone notices, aircraft are dispatched from a base that might be a hundred kilometres away, and the fire gets however long it takes them to arrive. By then a quarter-acre spot fire can be a frontage no air tanker is going to stop. The XPRIZE Autonomous Wildfire Response challenge asks for the opposite: detect an incipient fire over a large wildland area and put it out autonomously, fast, day or night, without a pilot.
The Think Circuits concept — AIDEN, an AI-driven drone extinguisher network — is a standing fleet rather than a callout. Three layers:
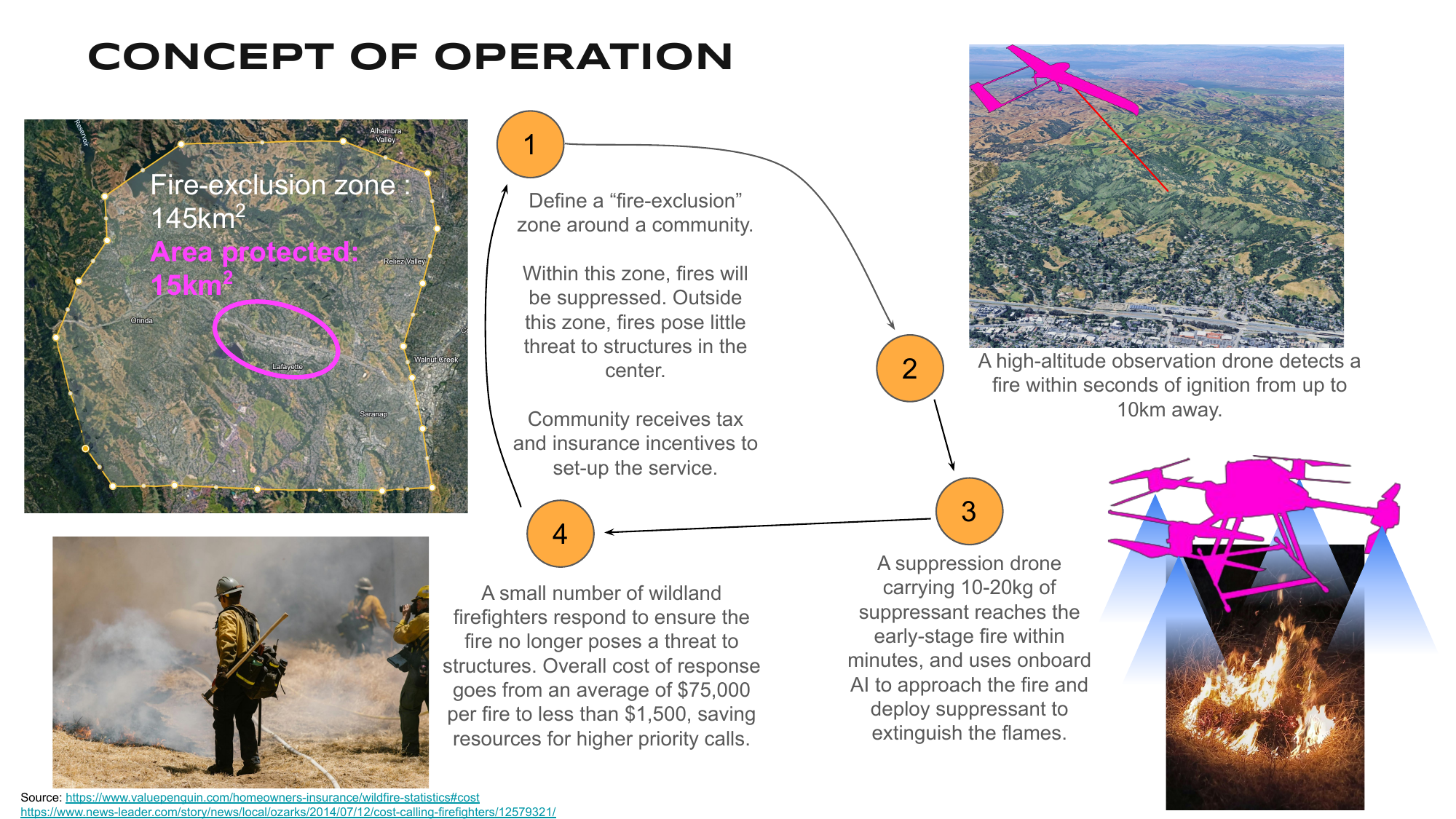
Detection drones loiter high and wide, watching for the radiometric signature of a new fire — a persistent observation layer rather than a camera someone has to point. Suppression drones sit at distributed, solar-powered base stations spread across the protected area so that some drone is always within a short flight of any point — and carry a non-toxic suppressant payload. A central operations hub handles refuel, rearm, heavier maintenance, and human oversight. The economics of the whole thing turn on one number: the response-time bound. If you want a drone on any ignition within, say, nine minutes, the base-station spacing falls out of that — a hexagonal grid sized to the suppression drone's cruise speed — and so does the cost per protected square kilometre. That math is the difference between a science project and something an insurer or a utility would actually fund.



The detection layer in the full proposal leans on a purpose-built long-range radiometric fire sensor — different radio signatures for flame, smoke, and background, readable from far enough away to matter. Those specifics are out of scope here; the parts of the system that actually exist — and that this post's demo recreates — are the optical detection pipeline and the fleet logic on top.


What's built
A concept submission is one thing; here's the system that actually exists.

FlameCam — patent-pending wide-area fire detection. The detection payload is the piece of AIDEN under patent application. The goal is brutal: from a drone loitering high over a large area, pick out a new flame from kilometres away — on the order of ten kilometres — while it's still small enough to put out, day or night. The hard part isn't seeing something hot; it's not raising the alarm on everything that merely looks like fire — sun glint off metal, a hot roof, a reflection, a brake light. FlameCam's invention is how it earns confidence: it cross-checks the candidate across more than one co-registered view and only calls a detection when the signature holds up consistently, which is what kills the single-sensor false alarms that make naïve fire detectors useless in the field. It runs on a small embedded payload and streams its camera feeds and the live detection overlay over WebRTC, so an operator — or the dispatch brain — sees exactly what the drone sees. (US patent application pending; the rest stays under wraps while it is.)

A targeted suppression payload. The suppression end is a stabilised gimbal carrying thermal and visible cameras and a pump-fed nozzle. It runs a small state machine — stored (safe, pointed away), armed (pointed down, motion-stabilised against the airframe, searching), firing (pump on, tracking the hot spot) — with a ballistics model that aims the stream given the drone's altitude and the gimbal pose. The point is that the drone doesn't just dump a load near a fire; it puts it on the fire.


A wind-aware dispatch brain. When a fire is confirmed, which suppression drone goes? Not the one that's nearest in metres — the one that's nearest in time, and time depends on the wind. A drone heading upwind to a fire is slow; the same drone heading crosswind has to crab into it and loses ground speed too. So the dispatcher works in wind-adjusted travel time: it figures the real arrival time to every point given the current wind, carves the protected area into coverage cells — one per suppression drone, the drones spread out so the cells cover the area evenly — and sends the drone whose cell the fire falls in. Those cells are precomputed for each drone for a handful of wind presets, so the decision is instant.
A fleet-ops dashboard. Tying it together is
a map view: every drone's position and heading, the
detection camera footprints, the wind-adjusted coverage
cells, the wind, ground-truth fires versus confirmed
detections, and a per-asset status panel. Everything moves
over MQTT — v1/agents/+/location,
…/fov, …/flamecam/detections,
v1/demo/wind, v1/demo/voronoi,
v1/demo/fire_truth — with a scenario engine on
the side that can script a whole incident (timed ignitions,
wind shifts) and an "ignite here" button for live Q&A.
Exactly that setup drives the team's refinery-protection
walkthrough.
The fleet-ops dashboard, live
Embedded below is the actual dashboard — the same React +
Mapbox app, the same map layers (coverage cells, wind field,
camera footprints, fire markers, the fleet rail) — with one
thing swapped out: instead of subscribing to a real MQTT
broker, it runs an in-browser scenario player that publishes
the exact same message stream the live drones and dispatch
brain would (v1/agents/…/location,
…/fov,
…/flamecam/detections,
v1/demo/wind, v1/demo/voronoi,
v1/demo/fire, v1/demo/fire_truth).
It loops the scripted refinery incident: a flare-stack
anomaly, a wind shift, then a high-intensity tank-farm fire —
detection drones break off to orbit, the dispatch brain picks
the fastest responder by wind-adjusted travel time, and the
coverage cells re-skew as the wind backs around. Hit
Ignite (bottom-right) and click the map to stage your
own fire.
How the demo works
What's real vs. stubbed. The dashboard,
the Mapbox rendering, the map layers, the HUD, the
click-to-ignite flow — all the original code. What's stubbed
is the data source: the live system streams telemetry from
the drones and the dispatch brain over MQTT; here a single
TypeScript module replays an equivalent stream — drone motion,
camera footprints, FlameCam detections, the coverage map,
dispatch and clearance events — driven by a scripted timeline.
The coverage cells use the same wind-adjusted travel-time
estimate the dispatch brain uses, evaluated over the area and
merged into the same staircased coverage polygons the real
v1/demo/voronoi messages carry.
Why wind-adjusted coverage. A plain nearest-in-metres carve-up is wrong under wind: a fire that's closer to drone A but downwind of drone B should still go to B, because B gets there first. So the coloured cells are a coverage map drawn in travel time, not distance — each patch of ground belongs to whichever suppression drone reaches it soonest given the current wind. Watch them stretch and re-skew when the wind shifts from a Gulf sea breeze to a sustained southwesterly partway through the loop.
Why this is the interesting half
The cameras and the gimbal are good engineering, but the part that generalises is the layer in the middle: turning a stream of raw sensor data into a confirmed event, deciding who acts under a hard time bound, and coordinating a fleet over a flaky low-bandwidth link where each agent has to reason locally from a high-level objective. That's the same shape of problem whether the payload is a water cannon, a warehouse picker, or anything else you'd put a learned model on board. Wildfire just makes the deadline honest.
About the project. AIDEN is a Think Circuits team project. Kevin Weekly, who runs Think Circuits, leads the program — architecture, business case, the drones, the fleet-coordination and dispatch software, and the operations dashboard. FlameCam, the detection payload, is the team's main contribution: it started from an insight by the optical engineer; Kevin built a first prototype around it, the optical engineer and others built the next, and the team carries the signal processing, computer vision and detection results from there. The network-sizing analysis is a colleague's work. The team advanced to the finalist-announcement stage of the XPRIZE Autonomous Wildfire Response competition.