→ Builds, ships & leads · embodied sensing
A fleet of robots that ride the river
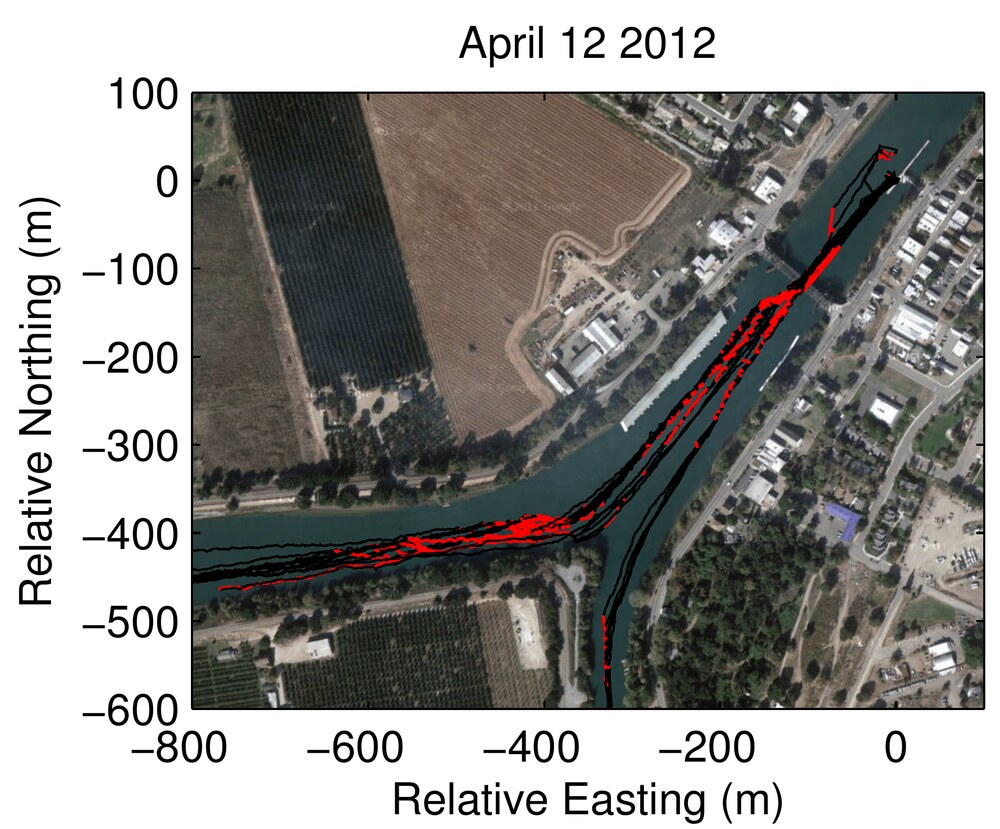
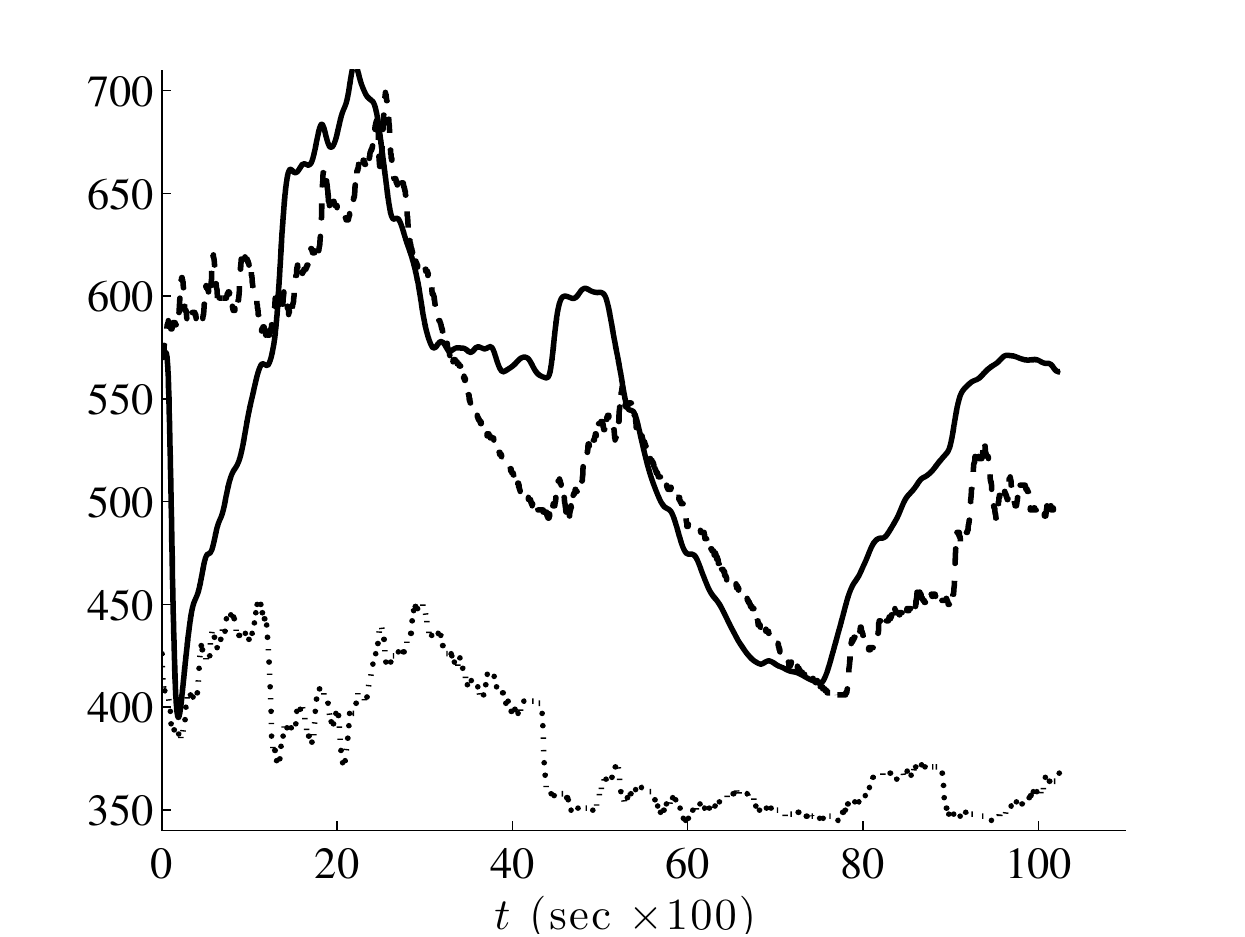
To measure how water actually moves through the Sacramento–San Joaquin Delta, our lab built drifting robots — including a low-cost one built around an Android phone (cheap enough to deploy in dense swarms) and a self-propelled "Generation-3" drifter. I designed the electronics and on-board software (verified in software-in-the-loop simulation before it ever touched water) and helped assemble roughly 140 of them. The data those swarms returned was assimilated into reconstructed flow fields of the river.
Today: The instinct hasn't changed: get a lot of cheap, rugged, autonomous things into the field and make the data they bring back actually usable. That's the autonomous material-handling vehicle, the XPRIZE wildfire drones, and 20-plus Think Circuits builds.
- Heterogeneous Fleets of Active and Passive Floating Sensors for River StudiesJournal of Field Robotics 33(5), 2015
- Applied Estimation of Mobile Environments — Ch. 2, Mobile Floating SensorsPh.D. dissertation, UC Berkeley, 2014